隨著智能家居生態的持續完善,掃地機器人已從可選清潔工具升級為家庭剛需產品,憑借自主化、智能化優勢重構家居清潔場景。2025年,行業在硬件迭代、算法優化與場景拓展的多重驅動下,呈現精準清潔、深度智能、全場景適配的發展特征,其核心競爭力已深度綁定硬件結構的協同性與軟件算法的創新性。
一、掃地機器人基本結構:智能清潔硬件基礎
掃地機器人的核心性能依賴硬件系統的協同運作,其基本結構聚焦關鍵功能模塊,兼顧實用性與智能化適配。
1.機身外殼:以高強度工程塑料為主材,兼顧抗沖擊性與輕量化設計,外觀貼合現代家居審美,同時優化空氣動力學結構以降低移動阻力,部分高端機型采用抗菌材質提升衛生性。
2.動力系統:標配雙驅動輪+萬向輪組合,驅動輪采用高摩擦耐磨材質,適配木地板、瓷磚、地毯等多地面場景,電機響應速度提升至毫秒級,配合差速轉向技術實現靈活走位。
3.清掃系統:邊刷負責邊角垃圾聚攏,轉速可根據場景動態調節;主刷分為滾刷式與吸口式,滾刷適配混合垃圾清掃,吸口式針對毛發防纏繞優化,2025年主流機型均搭載可拆洗抗菌刷體。
4.吸塵系統:由高速電機、優化風道與密封塵盒組成,風機轉速突破20萬轉/分,風道負壓設計提升吸塵效率,塵盒配備HEPA高效濾網,過濾精度達0.1微米,避免二次揚塵。
5.傳感器系統:高端機型集成20+傳感器,核心包括激光雷達(測距精度±2mm)、視覺傳感器(4K分辨率)、碰撞傳感器、懸崖傳感器等,多維度實現環境探測與安全防護。
6.控制與電池系統:控制系統以高性能微處理器為核心,承載算法運行與指令調度;電池采用大容量鋰電池,主流續航達120-180分鐘,支持快充與自動回充,充電管理系統保障電池循環壽命超1500次。
7.連接系統:作為硬件協同與外部交互的核心,涵蓋內部連接器與外部接口。內部連接器負責傳感器、電機、控制器等部件的信號與電力傳輸,需滿足抗振動、低損耗要求,保障復雜工況下的穩定運行;外部接口以Type-C為主流,支持快充、數據傳輸與OTA固件升級,部分高端機型集成無線通信模塊,實現與智能家居系統的聯動。
二、工作原理:感知-決策-執行的智能閉環
掃地機器人的運行遵循“環境感知-路徑決策-清潔執行”的核心邏輯,形成自主化清潔流程。啟動后先完成初始化自檢,傳感器系統、動力部件與連接系統逐一校準,加載預設工作參數;清掃中通過激光雷達、視覺傳感器構建環境地圖,碰撞、懸崖等傳感器實時反饋障礙物與邊緣信息,數據經連接系統傳輸至控制系統;控制系統基于算法解析環境數據,規劃最優清掃路徑,同時聯動清掃系統與動力系統,邊刷聚攏垃圾、主刷卷入雜物、吸塵系統吸入塵盒,根據地面臟污程度動態調整吸力與清掃時長;遇到障礙物時及時調整方向,陷入困境則啟動脫困程序,完成清掃或電量不足時,通過定位系統與連接系統聯動,自動返回充電基站,全程無需人工干預。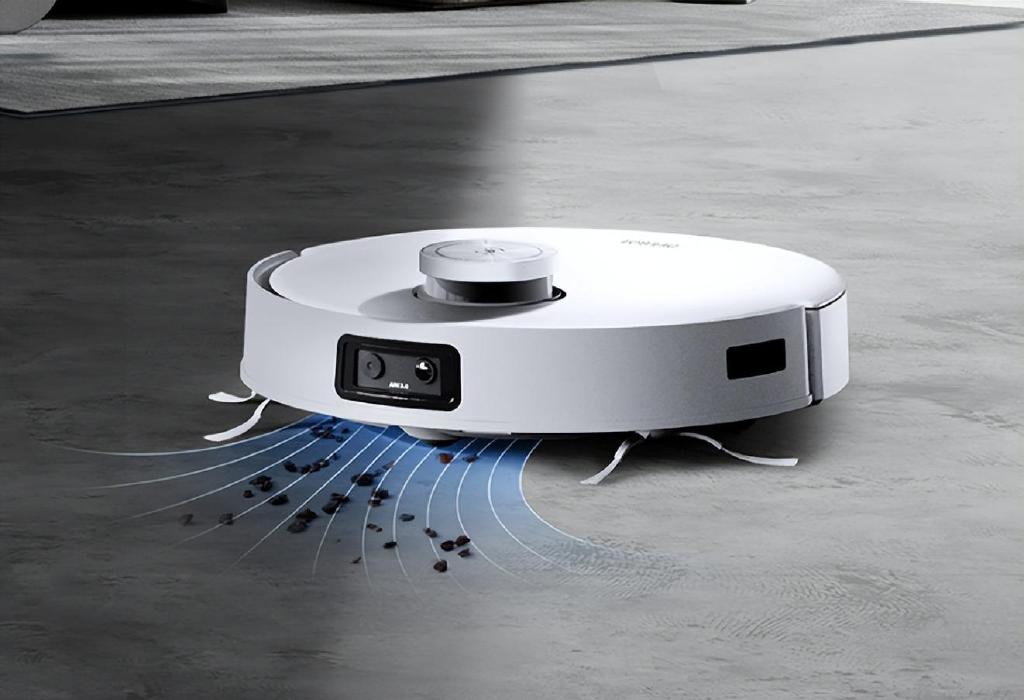
三、常用算法:導航與決策的核心支撐
(一)路徑規劃算法
隨機碰撞算法結構簡單無需復雜硬件,通過隨機移動覆蓋清掃區域,成本較低但效率不足,僅用于入門級機型,易出現重復清掃與碰撞問題。局部規劃算法基于實時感知的局部環境信息規劃路徑,采用啟發式搜索邏輯繞過障礙物,對臨時障礙適應性強,清掃效率優于隨機算法,但存在局部最優解局限。全局規劃算法依托激光雷達或視覺傳感器構建全局地圖,通過A、Dijkstra等算法規劃最優路徑,避免重復與遺漏,清掃效率提升30%以上,是中端機型主流方案。
基于機器學習的算法通過分析清潔數據識別高頻臟污區域、障礙物類型,自主優化清掃策略,實現個性化清潔,需大量數據訓練與算力支撐,多見于高端機型。混合算法融合全局規劃與局部規劃優勢,初期按全局地圖清掃,遇復雜場景切換局部算法,兼顧效率與適應性,已成為2025年高端機型標配。
(二)定位與導航算法
里程計定位通過驅動輪編碼器記錄運動數據估算位置,實現簡單直接且實時性強,但易因打滑、磨損產生誤差累積,需配合其他算法修正。傳感器融合定位整合激光雷達、視覺傳感器與里程計數據,通過卡爾曼濾波等算法消除單一傳感器誤差,定位精度顯著提升,增強系統魯棒性。SLAM導航算法作為核心導航技術,同步實現自身定位與環境地圖構建,支持未知環境自主探索,地圖精度達厘米級,為路徑規劃提供精準依據,其性能直接決定機器人導航能力。
四、國際發展現狀
國際品牌長期聚焦高端市場,以深度技術自研構建核心競爭優勢。戴森、iRobot等龍頭企業持續深耕核心技術,戴森360VisNav搭載全景視覺與SLAM融合方案,配備26個傳感器與高性能連接系統,既實現無死角環境探測,又能無縫對接智能家居生態;iRobot Roomba系列不斷優化路徑記憶算法,其自動集塵基站生態已發展成熟,成為用戶體驗升級的重要支撐。這些品牌的產品定價集中在6000-10000元區間,主打抗菌清潔、多模態交互等高端功能,憑借技術優勢占據全球高端市場超60%的份額。專利布局重點集中在傳感器融合、算法優化與連接系統穩定性等核心領域,形成堅實的技術壁壘。市場布局上,國際品牌主要聚焦北美、歐洲等成熟市場,2024年全球銷量前三大品牌均為國際企業,合計占比達45%,產品設計充分適配當地大戶型與復雜家居布局特點,進一步鞏固市場優勢。
五、國內發展現狀
中國已成為全球最大的掃地機器人市場與制造基地,行業整體呈現“量價齊升”的良好發展態勢。奧維云網數據顯示,2023年國內掃地機器人零售額達137億元,2024年預計增至147.9億元,其中2000-4000元中端機型占比超60%,成為消費主力,4000元以上高端機型滲透率也已提升至25%。本土企業在技術領域持續突破,科沃斯、石頭科技等頭部品牌成功實現SLAM算法與傳感器模組的自主研發,科沃斯AIVI3D避障技術可精準識別20+類障礙物,石頭科技則以海外市場為重要增長點,海外營收占比超40%,在歐洲、東南亞市場保持顯著增速。行業集中度持續走高,前五大品牌合計市場份額超80%,專利申請量年均增長22%,核心技術研發聚焦AI交互、連接系統優化等關鍵方向,憑借高性價比優勢推動國產替代進程不斷加速。
智能化與場景拓展
2025年掃地機器人行業的技術迭代將呈現多維度并進態勢。AI大模型的深度融合將實現自然語言的精準理解與場景化清潔決策,讓機器人更懂用戶需求;傳感器系統向8K視覺與激光雷達融合方案升級,環境識別精度進一步提升;連接系統朝著高速化、低功耗方向演進,支持更廣泛的智能家居生態聯動;電機能效與電池技術持續優化,續航能力有望突破4小時,快充15分鐘即可滿足1小時清掃需求,徹底解決用戶續航焦慮。
市場發展將呈現高端化與大眾化雙線并行的特征,高端機型聚焦多功能集成與極致體驗,入門機型則保障基礎清潔能力,滿足不同消費層級需求。出海已成為行業增長核心動力,本土企業正加速東南亞、拉美等新興市場布局,憑借本土化研發與高性價比策略拓展全球份額,預計2027年國內企業全球市場占比將超40%。
場景適配也在持續深化,家庭場景中不斷細分出寵物專用、母嬰友好等針對性機型,商用場景則向辦公樓、酒店、工廠等領域滲透,大容量、遠程管理型產品成為新的需求熱點。同時,掃地機器人與智能家居生態的聯動更加緊密,逐步實現清潔與環境監測、安防等功能的協同運作,構建更完整的智能生活體驗。
2025年掃地機器人行業已邁入硬件協同+算法智能+生態互聯的新階段,基本結構的精細化升級尤其是連接系統的優化,與核心算法的迭代創新相互賦能,共同推動清潔效率與用戶體驗的雙重提升。國際品牌憑借深厚技術積累堅守高端賽道,國內企業則依托性價比優勢與快速創新實現彎道超車。未來,隨著技術成本的逐步下降與場景適配的持續深化,掃地機器人將徹底擺脫“單一清潔工具”的定位,升級為兼具清潔、監測、交互功能的智能生活管家,成為智能家居生態的核心樞紐,為行業持續增長注入持久動力。


